

大车自动控制
1、功能简介
集成卫星、激光、视觉、编码器等多模融合的定位与感知技术,实现轮胎吊大车自动驾驶,包括自动纠偏(视觉+卫星)、智能防撞(视觉+激光)和精准停车(卫星+编码器)等功能。在人车混合、有人无人集卡混行的码头开展高效作业。 接收TOS指令,自动驾驶场桥到指定箱区贝位,并精准停到目标位置。行驶效率略高于有经验的司机。

2、技术指标
(1)定位精度:<15mm,定位可靠性>99.99%,位置刷新率:1~20Hz
(2)行驶偏差:正常行驶<±30mm,启停<±50mm,方向偏差<0.1°,最高可达95%全速;
(3)目标检测大小:可以检测6米范围内30cm x 30cm x 30cm大小的障碍物,15米范围内50cm x 50cm x 50cm大小的阻碍物。
(4)障碍物识别和探测范围:0~30m;障碍物识别刷新率 10Hz,防撞响应时间小于 500ms;
(5)停车精度:相对于贝位中心偏差小于2厘米、左右轮角度偏差1厘米,停车曲线优于人工操作,一步到位停准。
123
3、系统功能
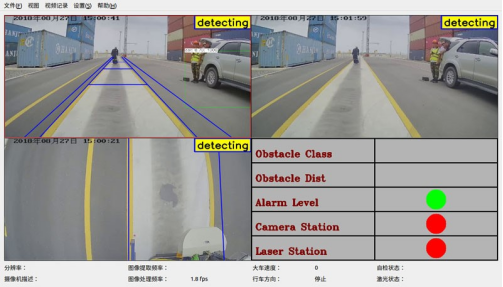
(1)大车防撞:障碍物识别(激光扫描),智能防撞模块(RTG设备控制系统),实时数据回传(大车行驶视角的视频和障碍物数据以及叠加后视频)
(2)自动纠偏:大车纠偏(GNSS定位,地图,视觉识别),防撞保护(最小最大距离停车保护功能),堆场区域判断(自动识别堆场位置),自动过街(相邻堆场转场区域纠偏功能),大车转场支持(轮胎吊大车转场区轮胎90度的自动纠偏),故障判断警示(系统断电或致命故障时)
(3)大车定位:获取实时GNSS位置,其短暂失效时编码器推导会继续保证定位数据持续输出,并通过自有运动控制算法控制大车精准停到目标位置。
123

4、系统优势
(1)该系统的先进性包括:全天候自适应、自动行走、自动纠偏、自动停车(可选)、智能防撞、多技术冗余、先进的算法、独特的控制策略、标准的接口协议、多系统统一入口等,以及实时的数据收集和分析过程、充分的保护、标准的接口、可扩展性和易于维护。
(2)采用唐恩首推的“激光+视觉+RTK+编码器”融合技术,以全域大范围的精准北斗 RTK 为基础,融合激光扫描和视觉识别技术实现精准定位和识别算法核心,并采集港机和堆场的编码器和编号图标等数据,择优辅助核心定位算法,对自动化场桥实现全天候、全区域、全时效的(Any weather、Any where、Any time)厘米级精准定位和控制。
